Окружающий нас физический мир преисполнен движением. Практически невозможно найти хотя бы одно физическое тело, которое можно было бы считать находящимся в состоянии покоя. Кроме равномерно поступательного прямолинейного по сложной траектории, движения с ускорением и прочих, мы можем наблюдать воочию или испытывать на себе влияние периодически повторяющихся перемещений материальных предметов.
Человек давно заметил отличительные свойства и особенности и даже научился использовать механические колебания в своих целях. Все периодически повторяющиеся во времени процессы можно назвать колебаниями. Механические колебания являются лишь частью этого многообразного мира явлений, происходящих практически по одним законам. На наглядном примере механических повторяющихся движений можно составить основные правила и определить законы, по которым происходят электромагнитные, электромеханические и прочие колебательные процессы.
Природа возникновения механических колебаний кроется в периодическом превращении потенциальной энергии в кинетическую. Описать пример, как происходит превращение энергии при механических колебаниях, можно, рассматривая шарик, подвешенный на пружине. В спокойном состоянии сила тяжести уравновешивается пружины. Но стоит вывести систему из состояния равновесия принудительно, спровоцировав тем самым движение с сторону точки равновесия, как начнёт своё преобразование в кинетическую. А та, в свою очередь, с момента прохождения шариком нулевой позиции начнёт преобразовываться в потенциальную. Этот процесс происходит столь долго, насколько условия существования системы приближаются к безупречным.
Математически идеальными считаются колебания, происходящие по закону синуса или косинуса. Такие процессы принято называть гармоническими колебаниями. Идеальным примером механических гармонических колебаний является движение маятника в когда отсутствует влияние сил трения. Но это совершенно безупречный случай, добиться которого технически весьма проблематично.
Механические колебания, несмотря на их продолжительность, рано или поздно прекращаются, и система занимает положение относительного равновесия. Происходит это по причине растраты энергии на преодоление сопротивления воздуха, трения и прочих факторов, неотвратимо приводящих к корректировке расчётов при переходе от идеальных к реальным условиям, в которых существует рассматриваемая система.
Неотвратимо приближаясь к глубокому изучению и анализу, приходим к необходимости математически описать механические колебания. Формулы этого процесса включают такие величины, как амплитуда (А), (w), начальная фаза (a). А функция зависимости смещения (х) от времени (t) в классическом виде имеет вид
Также стоит упомянуть о величине, характеризующей механические колебания, имеющей название - период (T), который математически определяется, как
Механические колебания, кроме наглядности описания процессов колебаний немеханической природы, интересуют нас некоторыми свойствами, которые при правильном использовании могут оказать определённую пользу, а при их игнорировании - привести к существенным неприятностям.
Особое внимание требуется уделять явлению резкого скачка амплитуды при наступающих при приближении частоты воздействия вынуждающей силы к частоте собственных колебаний тела. Оно называется резонансом. Широко используемое в электронике, в механических системах явление резонанса в основном проявляет разрушительный характер, его необходимо учитывать при создании самых разнообразных механических конструкций и систем.
Следующим проявлением механических колебаний является вибрация. Её появление может оказать не только определённый дискомфорт, но и привезти к возникновению резонанса. Но, кроме отрицательного воздействия, местная вибрация с небольшой интенсивностью проявления может благоприятно воздействовать в целом на организм человека, улучшая функциональное состояние ЦНС, и даже ускорять и т.п.
Среди вариантов проявления механических колебаний можно выделить явление звука, ультразвука. Полезные свойства этих механических волн и других проявлений механических колебаний широко используются в самых различных отраслях человеческой жизнедеятельности.
1. Колебания. Периодические колебания. Гармонические колебания.
2. Свободные колебания. Незатухающие и затухающие колебания.
3. Вынужденные колебания. Резонанс.
4. Сопоставление колебательных процессов. Энергия незатухающих гармонических колебаний.
5. Автоколебания.
6. Колебания тела человека и их регистрация.
7. Основные понятия и формулы.
8. Задачи.
1.1. Колебания. Периодические колебания.
Гармонические колебания
Колебаниями называют процессы, отличающиеся той или иной степенью повторяемости.
Повторяющиеся процессы непрерывно происходят внутри любого живого организма, например: сокращения сердца, работа легких; мы дрожим, когда нам холодно; мы слышим и разговариваем благодаря колебаниям барабанных перепонок и голосовых связок; при ходьбе наши ноги совершают колебательные движения. Колеблются атомы, из которых мы состоим. Мир, в котором мы живем, удивительно склонен к колебаниям.
В зависимости от физической природы повторяющегося процесса различают колебания: механические, электрические и т.п. В настоящей лекции рассматриваются механические колебания.
Периодические колебания
Периодическими называют такие колебания, при которых все характеристики движения повторяются через определенный промежуток времени.
Для периодических колебаний используют следующие характеристики:
период колебаний Т, равный времени, в течение которого совершается одно полное колебание;
частота колебаний ν, равная числу колебаний, совершаемых за одну секунду (ν = 1/Т);
амплитуда колебаний А, равная максимальному смещению от положения равновесия.
Гармонические колебания
Особое место среди периодических колебаний занимают гармонические колебания. Их значимость обусловлена следующими причинами. Во-первых, колебания в природе и в технике часто имеют характер, очень близкий к гармоническому, и, во-вторых, периодические процессы иной формы (с другой зависимостью от времени) могут быть представлены как наложение нескольких гармонических колебаний.
Гармонические колебания - это колебания, при которых наблюдаемая величина изменяется во времени по закону синуса или косинуса:
В математике функции этого вида называют гармоническими, поэтому колебания, описываемые такими функциями, тоже называют гармоническими.
Положение тела, совершающего колебательное движение, характеризуется смещением относительно равновесного положения. В этом случае величины, входящие в формулу (1.1), имеют следующий смысл:
х - смещение тела в момент времени t;
А - амплитуда колебаний, равная максимальному смещению;
ω - круговая частота колебаний (число колебаний, совершаемых за 2π секунд), связанная с частотой колебаний соотношением
φ = (ωt +φ 0) - фаза колебаний (в момент времени t); φ 0 - начальная фаза колебаний (при t = 0).
 Рис. 1.1.
Графики зависимости смещения от времени для х(0) = А и х(0) = 0
Рис. 1.1.
Графики зависимости смещения от времени для х(0) = А и х(0) = 0
 1.2. Свободные колебания. Незатухающие и затухающие колебания
1.2. Свободные колебания. Незатухающие и затухающие колебания
Свободными или собственными называются такие колебания, которые происходят в системе, предоставленной самой себе, после того как она была выведена из положения равновесия.
Примером могут служить колебания шарика, подвешенного на нити. Для того чтобы вызвать колебания, нужно либо толкнуть шарик, либо, отведя в сторону, отпустить его. При толчке шарику сообщается кинетическая энергия, а при отклонении - потенциальная.
Свободные колебания совершаются за счет первоначального запаса энергии.
Свободные незатухающие колебания
Свободные колебания могут быть незатухающими только при отсутствии силы трения. В противном случае первоначальный запас энергии будет расходоваться на ее преодоление, и размах колебаний будет уменьшаться.
В качестве примера рассмотрим колебания тела, подвешенного на невесомой пружине, возникающие после того, как тело отклонили вниз, а затем отпустили (рис. 1.2).
 Рис. 1.2.
Колебания тела на пружине
Рис. 1.2.
Колебания тела на пружине
Со стороны растянутой пружины на тело действует упругая сила F, пропорциональная величине смещения х:
Постоянный множитель k называется жесткостью пружины и зависит от ее размеров и материала. Знак «-» указывает, что сила упругости всегда направлена в сторону, противоположную направлению смещения, т.е. к положению равновесия.
При отсутствии трения упругая сила (1.4) - это единственная сила, действующая на тело. Согласно второму закону Ньютона (ma = F):
 После
переноса всех слагаемых в левую часть и деления на массу тела (m)
получим дифференциальное уравнение свободных колебаний при отсутствии
трения:
После
переноса всех слагаемых в левую часть и деления на массу тела (m)
получим дифференциальное уравнение свободных колебаний при отсутствии
трения:
 Величина ω 0 (1.6) оказалась равной циклической частоте. Эту частоту называют собственной.
Величина ω 0 (1.6) оказалась равной циклической частоте. Эту частоту называют собственной.
Таким образом, свободные колебания при отсутствии трения являются гармоническими, если при отклонении от положения равновесия возникает упругая сила (1.4).
Собственная круговая частота является основной характеристикой свободных гармонических колебаний. Эта величина зависит только от свойств колебательной системы (в рассматриваемом случае - от массы тела и жесткости пружины). В дальнейшем символ ω 0 всегда будет использоваться для обозначения собственной круговой частоты (т.е. частоты, с которой происходили бы колебания при отсутствии силы трения).
Амплитуда свободных колебаний определяется свойствами колебательной системы (m, k) и энергией, сообщенной ей в начальный момент времени.
При отсутствии трения свободные колебания, близкие к гармоническим, возникают также и в других системах: математический и физический маятники (теория этих вопросов не рассматривается) (рис. 1.3).
Математический маятник - небольшое тело (материальная точка), подвешенное на невесомой нити (рис. 1.3 а). Если нить отклонить от положения равновесия на небольшой (до 5°) угол α и отпустить, то тело будет совершать колебания с периодом, определяемым по формуле
 где L - длина нити, g - ускорение свободного падения.
где L - длина нити, g - ускорение свободного падения.
 Рис. 1.3.
Математический маятник (а), физический маятник (б)
Рис. 1.3.
Математический маятник (а), физический маятник (б)
Физический маятник - твердое тело, совершающее колебания под действием силы тяжести вокруг неподвижной горизонтальной оси. На рисунке 1.3 б схематически изображен физический маятник в виде тела произвольной формы, отклоненного от положения равновесия на угол α. Период колебаний физического маятника описывается формулой
 где
J - момент инерции тела относительно оси, m - масса, h - расстояние
между центром тяжести (точка С) и осью подвеса (точка О).
где
J - момент инерции тела относительно оси, m - масса, h - расстояние
между центром тяжести (точка С) и осью подвеса (точка О).
Момент инерции - это величина, зависящая от массы тела, его размеров и положения относительно оси вращения. Вычисляется момент инерции по специальным формулам.
Свободные затухающие колебания
Силы трения, действующие в реальных системах, существенно изменяют характер движения: энергия колебательной системы постоянно убывает, и колебания либо затухают, либо вообще не возникают.
Сила сопротивления направлена в сторону, противоположную движению тела, и при не очень больших скоростях пропорциональна величине скорости:
 График таких колебаний представлен на рис. 1.4.
График таких колебаний представлен на рис. 1.4.
В качестве характеристики степени затухания используют безразмерную величину, называемую логарифмическим декрементом затухания λ.
 Рис. 1.4.
Зависимость смещения от времени при затухающих колебаниях
Рис. 1.4.
Зависимость смещения от времени при затухающих колебаниях
Логарифмический декремент затухания равен натуральному логарифму отношения амплитуды предыдущего колебания к амплитуде последующего колебания.
где i - порядковый номер колебания.
Нетрудно видеть, что логарифмический декремент затухания находится по формуле
Сильное затухание. При
выполнении условия β ≥ ω 0 система возвращается в положение равновесия, не совершая колебаний. Такое движение называется апериодическим. На рисунке 1.5 показаны два возможных способа возвращения в положение равновесия при апериодическом движении.
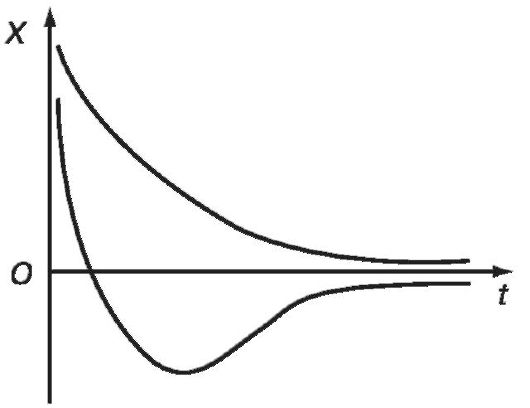 Рис. 1.5.
Апериодическое движение
Рис. 1.5.
Апериодическое движение
1.3. Вынужденные колебания, резонанс
Свободные колебания при наличии сил трения являются затухающими. Незатухающие колебания можно создать с помощью периодического внешнего воздействия.
Вынужденными называются такие колебания, в процессе которых колеблющаяся система подвергается воздействию внешней периодической силы (ее называют вынуждающей силой).
Пусть вынуждающая сила изменяется по гармоническому закону
 График вынужденных колебаний представлен на рис. 1.6.
График вынужденных колебаний представлен на рис. 1.6.
 Рис. 1.6.
График зависимости смещения от времени при вынужденных колебаниях
Рис. 1.6.
График зависимости смещения от времени при вынужденных колебаниях
Видно, что амплитуда вынужденных колебаний достигает установившегося значения постепенно. Установившиеся вынужденные колебания являются гармоническими, а их частота равна частоте вынуждающей силы:
Амплитуда (А) установившихся вынужденных колебаний находится по формуле:
 Резонансом
называется достижение максимальной амплитуды вынужденных колебаний при определенном значении частоты вынуждающей силы.
Резонансом
называется достижение максимальной амплитуды вынужденных колебаний при определенном значении частоты вынуждающей силы.
Если условие (1.18) не выполнено, то резонанс не возникает. В этом случае при увеличении частоты вынуждающей силы амплитуда вынужденных колебаний монотонно убывает, стремясь к нулю.
Графическая зависимость амплитуды А вынужденных колебаний от круговой частоты вынуждающей силы при разных значениях коэффициента затухания (β 1 > β 2 > β 3) показана на рис. 1.7. Такая совокупность графиков называется резонансными кривыми.
В некоторых случаях сильное возрастание амплитуды колебаний при резонансе является опасным для прочности системы. Известны случаи, когда резонанс приводил к разрушению конструкций.
 Рис. 1.7.
Резонансные кривые
Рис. 1.7.
Резонансные кривые
1.4. Сопоставление колебательных процессов. Энергия незатухающих гармонических колебаний
В таблице 1.1 представлены характеристики рассмотренных колебательных процессов.
Таблица 1.1. Характеристики свободных и вынужденных колебаний
 Энергия незатухающих гармонических колебаний
Энергия незатухающих гармонических колебаний
Тело, совершающее гармонические колебания, обладает двумя видами энергии: кинетической энергией движения Е к = mv 2 /2 и потенциальной энергией Е п, связанной с действием упругой силы. Известно, что при действии упругой силы (1.4) потенциальная энергия тела определяется формулой Е п = кх 2 /2. Для незатухающих колебаний х = А cos(ωt), а скорость тела определяется по формуле v = - А ωsin(ωt). Отсюда получаются выражения для энергий тела, совершающего незатухающие колебания:
 Полная
энергия системы, в которой происходят незатухающие гармонические
колебания, складывается из этих энергий и остается неизменной:
Полная
энергия системы, в которой происходят незатухающие гармонические
колебания, складывается из этих энергий и остается неизменной:
Здесь m - масса тела, ω и A - круговая частота и амплитуда колебаний, k - коэффициент упругости.
1.5. Автоколебания
Существуют такие системы, которые сами регулируют периодическое восполнение потерянной энергии и поэтому могут колебаться длительное время.
Автоколебания - незатухающие колебания, поддерживаемые внешним источником энергии, поступление которой регулируется самой колебательной системой.
Системы, в которых возникают такие колебания, называются автоколебательными. Амплитуда и частота автоколебаний зависят от свойств самой автоколебательной системы. Автоколебательную систему можно представить следующей схемой:
 В
данном случае сама колебательная система каналом обратной связи
воздействует на регулятор энергии, информируя его о состоянии системы.
В
данном случае сама колебательная система каналом обратной связи
воздействует на регулятор энергии, информируя его о состоянии системы.
Обратной связью называется воздействие результатов какоголибо процесса на его протекание.
Если такое воздействие приводит к возрастанию интенсивности процесса, то обратная связь называется положительной. Если воздействие приводит к уменьшению интенсивности процесса, то обратная связь называется отрицательной.
В автоколебательной системе может присутствовать как положительная, так и отрицательная обратная связь.
Примером автоколебательной системы являются часы, в которых маятник получает толчки за счет энергии поднятой гири или закрученной пружины, причем эти толчки происходят в те моменты, когда маятник проходит через среднее положение.
Примером биологических автоколебательных систем являются такие органы, как сердце, легкие.
1.6. Колебания тела человека и их регистрация
Aнализ колебаний, создаваемых телом человека или его отдельными частями, широко используется в медицинской практике.
Колебательные движения тела человека при ходьбе
Ходьба - это сложный периодический локомоторный процесс, возникающий в результате координированной деятельности скелетных мышц туловища и конечностей. Aнализ процесса ходьбы дает много диагностических признаков.
Характерной особенностью ходьбы является периодичность опорного положения одной ногой (период одиночной опоры) или двух ног (период двойной опоры). В норме соотношение этих периодов равно 4:1. При ходьбе происходит периодическое смещение центра масс (ЦМ) по вертикальной оси (в норме на 5 см) и отклонение в сторону (в норме на 2,5 см). При этом ЦМ совершает движение по кривой, которую приближенно можно представить гармонической функцией (рис. 1.8).
 Рис. 1.8.
Вертикальное смещение ЦМ тела человека во время ходьбы
Рис. 1.8.
Вертикальное смещение ЦМ тела человека во время ходьбы
Сложные колебательные движения при поддержании вертикального положения тела.
У человека, стоящего вертикально, происходят сложные колебания общего центра масс (ОЦМ) и центра давления (ЦД) стоп на плоскость опоры. На анализе этих колебаний основана статокинезиметрия - метод оценки способности человека сохранять вертикальную позу. Посредством удержания проекции ОЦМ в пределах координат границы площади опоры. Данный метод реализуется с помощью стабилометрического анализатора, основной частью которого является стабилоплатформа, на которой в вертикальной позе находится испытуемый. Колебания, совершаемые ЦД испытуемого при поддержании вертикальной позы, передаются стабилоплатформе и регистрируются специальными тензодатчиками. Сигналы тензодатчиков передаются на регистрирующее устройство. При этом записывается статокинезиграмма - траектория перемещения ЦД испытуемого на горизонтальной плоскости в двумерной системе координат. По гармоническому спектру статокинезиграммы можно судить об особенностях вертикализации в норме и при отклонениях от нее. Данный метод позволяет анализировать показатели статокинетической устойчивости (СКУ) человека.
Механические колебания сердца
Существуют различные методы исследования сердца, в основе которых лежат механические периодические процессы.
Баллистокардиография (БКГ) - метод исследования механических проявлений сердечной деятельности, основанный на регистрации пульсовых микроперемещений тела, обусловленных выбрасыванием толчком крови из желудочков сердца в крупные сосуды. При этом возникает явление отдачи. Тело человека помещают на специальную подвижную платформу, находящуюся на массивном неподвижном столе. Платформа в результате отдачи приходит в сложное колебательное движение. Зависимость смещения платформы с телом от времени называется баллистокардиограммой (рис. 1.9), анализ которой позволяет судить о движении крови и состоянии сердечной деятельности.
Апекскардиография (AKГ) - метод графической регистрации низкочастотных колебаний грудной клетки в области верхушечного толчка, вызванных работой сердца. Регистрация апекскардиограммы производится, как правило, на многоканальном электрокарди-
 Рис. 1.9.
Запись баллистокардиограммы
Рис. 1.9.
Запись баллистокардиограммы
ографе при помощи пьезокристаллического датчика, являющегося преобразователем механических колебаний в электрические. Перед записью на передней стенке грудной клетки пальпаторно определяют точку максимальной пульсации (верхушечный толчок), в которой и фиксируют датчик. По сигналам датчика автоматически строится апекскардиограмма. Проводят амплитудный анализ АКГ - сравнивают амплитуды кривой при разных фазах работы сердца с максимальным отклонением от нулевой линии - отрезок ЕО, принимаемый за 100%. На рисунке 1.10 представлена апекскардиограмма.
 Рис. 1.10.
Запись апекскардиограммы
Рис. 1.10.
Запись апекскардиограммы
Кинетокардиография (ККГ) - метод регистрации низкочастотных вибраций стенки грудной клетки, обусловленных сердечной деятельностью. Кинетокардиограмма отличается от апекскардиограммы: первая фиксирует запись абсолютных движений грудной стенки в пространстве, вторая регистрирует колебания межреберий относительно ребер. В данном методе определяются перемещение (ККГ х), скорость перемещения (ККГ v) а также ускорение (ККГ а) для колебаний грудной клетки. На рисунке 1.11 представлено сопоставление различных кинетокардиограмм.
 Рис. 1.11.
Запись кинетокардиограмм перемещения (х), скорости (v), ускорения (а)
Рис. 1.11.
Запись кинетокардиограмм перемещения (х), скорости (v), ускорения (а)
Динамокардиография (ДКГ) - метод оценки перемещения центра тяжести грудной клетки. Динамокардиограф позволяет регистрировать силы, действующие со стороны грудной клетки человека. Для записи динамокардиограммы пациент располагается на столе лежа на спине. Под грудной клеткой находится воспринимающее устройство, которое состоит из двух жестких металлических пластин размером 30x30 см, между которыми расположены упругие элементы с укрепленными на них тензодатчиками. Периодически меняющаяся по величине и месту приложения нагрузка, действующая на воспринимающее устройство, слагается из трех компонент: 1) постоянная составляющая - масса грудной клетки; 2) переменная - механический эффект дыхательных движений; 3) переменная - механические процессы, сопровождающие сердечное сокращение.
Запись динамокардиограммы осуществляют при задержке дыхания исследуемым в двух направлениях: относительно продольной и поперечной оси воспринимающего устройства. Сравнение различных динамокардиограмм показано на рис. 1.12.
Сейсмокардиография основана на регистрации механических колебаний тела человека, вызванных работой сердца. В этом методе с помощью датчиков, установленных в области основания мечевидного отростка, регистрируется сердечный толчок, обусловленный механической активностью сердца в период сокращения. При этом происходят процессы, связанные с деятельностью тканевых механорецепторов сосудистого русла, активирующихся при снижении объема циркулирующей крови. Сейсмокардиосигнал формирует форма колебаний грудины.
 Рис. 1.12.
Запись нормальной продольной (а) и поперечной (б) динамокардиограмм
Рис. 1.12.
Запись нормальной продольной (а) и поперечной (б) динамокардиограмм
Вибрация
Широкое внедрение различных машин и механизмов в жизнь человека повышает производительность труда. Однако работа многих механизмов связана с возникновением вибраций, которые передаются человеку и оказывают на него вредное влияние.
Вибрация - вынужденные колебания тела, при которых либо все тело колеблется как единое целое, либо колеблются его отдельные части с различными амплитудами и частотами.
Человек постоянно испытывает различного рода вибрационные воздействия в транспорте, на производстве, в быту. Колебания, возникшие в каком-либо месте тела (например, руке рабочего, держащего отбойный молоток), распространяются по всему телу в виде упругих волн. Эти волны вызывают в тканях организма переменные деформации различных видов (сжатие, растяжение, сдвиг, изгиб). Действие вибраций на человека обусловлено многими факторами, характеризующими вибрации: частотой (спектр частот, основная частота), амплитудой, скоростью и ускорением колеблющейся точки, энергией колебательных процессов.
Продолжительное воздействие вибраций вызывает в организме стойкие нарушения нормальных физиологических функций. Может возникнуть «вибрационная болезнь». Эта болезнь приводит к ряду серьезных нарушений в организме человека.
Влияние, которое вибрации оказывают на организм, зависит от интенсивности, частоты, длительности вибраций, места их приложения и направления по отношению к телу, позе, а также от состояния человека и его индивидуальных особенностей.
Колебания с частотой 3-5 Гц вызывают реакции вестибулярного аппарата, сосудистые расстройства. При частотах 3-15 Гц наблюдаются расстройства, связанные с резонансными колебаниями отдельных органов (печень, желудок, голова) и тела в целом. Колебания с частотами 11-45 Гц вызывают ухудшение зрения, тошноту, рвоту. При частотах, превышающих 45 Гц, возникают повреждение сосудов головного мозга, нарушение циркуляции крови и т.д. На рисунке 1.13 приведены области частот вибрации, оказывающие вредное действие на человека и системы его органов.
 Рис. 1.13.
Области частот вредного воздействия вибрации на человека
Рис. 1.13.
Области частот вредного воздействия вибрации на человека
В то же время в ряде случаев вибрации находят применение в медицине. Например, при помощи специального вибратора стоматолог готовит амальгаму. Использование высокочастотных вибрационных аппаратов позволяет высверлить в зубе отверстие сложной формы.
Вибрация используется и при массаже. При ручном массаже массируемые ткани приводятся в колебательное движение при помощи рук массажиста. При аппаратном массаже используются вибраторы, в которых для передачи телу колебательных движений служат наконечники различной формы. Вибрационные аппараты подразделяются на аппараты для общей вибрации, вызывающие сотрясение всего тела (вибрационные «стул», «кровать», «платформа» и др.), и аппараты местного вибрационного воздействия на отдельные участки тела.
Механотерапия
В лечебной физкультуре (ЛФК) используются тренажеры, на которых осуществляются колебательные движения различных частей тела человека. Они используются в механотерапии - форме ЛФК, одной из задач которой является осуществление дозированных, ритмически повторяющихся физических упражнений с целью тренировки или восстановления подвижности в суставах на аппаратах маятникового типа. Основу этих аппаратов составляет балансирующий (от фр. balancer - качать, уравновешивать) маятник, который представляет собой двуплечный рычаг, совершающий колебательные (качательные) движения около неподвижной оси.
1.7. Основные понятия и формулы
 Продолжение таблицы
Продолжение таблицы
 Продолжение таблицы
Продолжение таблицы
 Окончание таблицы
Окончание таблицы
 1.8. Задачи
1.8. Задачи
1. Привести примеры колебательных систем у человека.
2. У взрослого человека сердце делает 70 сокращений в минуту. Определить: а) частоту сокращений; б) число сокращений за 50 лет
Ответ: а) 1,17 Гц; б) 1,84х10 9 .
3. Какую длину должен иметь математический маятник, чтобы период его колебаний был равен 1 секунде?
 4.
Тонкий
прямой однородный стержень длиной 1 м подвешен за конец на оси.
Определить: а) чему равен период его колебаний (малых)? б) какова длина
математического маятника, имеющего такой же период колебаний?
4.
Тонкий
прямой однородный стержень длиной 1 м подвешен за конец на оси.
Определить: а) чему равен период его колебаний (малых)? б) какова длина
математического маятника, имеющего такой же период колебаний?
 5.
Тело
массой 1 кг совершает колебания по закону х = 0,42 cos(7,40t), где t -
измеряется в секундах, а х - в метрах. Найти: а) амплитуду; б) частоту;
в) полную энергию; г) кинетическую и потенциальную энергии при х = 0,16
м.
5.
Тело
массой 1 кг совершает колебания по закону х = 0,42 cos(7,40t), где t -
измеряется в секундах, а х - в метрах. Найти: а) амплитуду; б) частоту;
в) полную энергию; г) кинетическую и потенциальную энергии при х = 0,16
м.
 6.
Оценить скорость, с которой идет человек при длине шага l
=
0,65 м. Длина ноги L = 0,8 м; центр тяжести находится на расстоянии H =
0,5 м от ступни. Для момента инерции ноги относительно тазобедренного
сустава использовать формулу I = 0,2mL 2 .
6.
Оценить скорость, с которой идет человек при длине шага l
=
0,65 м. Длина ноги L = 0,8 м; центр тяжести находится на расстоянии H =
0,5 м от ступни. Для момента инерции ноги относительно тазобедренного
сустава использовать формулу I = 0,2mL 2 .
 7.
Каким
образом можно определить массу небольшого тела на борту космической
станции, если в вашем распоряжении имеются часы, пружина и набор гирь?
7.
Каким
образом можно определить массу небольшого тела на борту космической
станции, если в вашем распоряжении имеются часы, пружина и набор гирь?
 8.
Амплитуда
затухающих колебаний убывает за 10 колебаний на 1/10 часть своей
первоначальной величины. Период колебаний Т = 0,4 с. Определить
логарифмический декремент и коэффициент затухания.
8.
Амплитуда
затухающих колебаний убывает за 10 колебаний на 1/10 часть своей
первоначальной величины. Период колебаний Т = 0,4 с. Определить
логарифмический декремент и коэффициент затухания.
Механические колебания
1. Механические колебания
1.1 Механические колебания: гармонические, затухающие и вынужденные колебания
1.2 Автоколебания
1.3 Разложение колебаний в гармонический спектр. Применение гармонического анализа для обработки диагностических данных
1.4 Механические волны, их виды и скорость распространения
1.5 Энергетические характеристики волны
Список использованных источников
1. Механические колебания
1.1 Механические колебания: гармонические, затухающие и вынужденные колебания
Колебаниями называются процессы, отличающиеся той или иной степенью повторяемости (качание маятника часов, колебания струны или ножек камертона, напряжение между обкладками конденсатора в контуре радиоприемника, работа сердца).
В зависимости от физической природы повторяющегося процесса различают колебания: механические, электромагнитные, электромеханические и т.д. Мы будем рассматривать механические колебания. Колебания, происходящие при отсутствии трения и внешних сил, называются собственными; их частота зависит только от свойств системы.
Простейшими являются гармонические колебания, т.е. такие колебания, при которых колеблющаяся величина (например, отклонение маятника) изменяется со временем по закону синуса или косинуса.
Дифференциальное уравнение гармонического колебания
Рассмотрим простейшую колебательную систему: шарик массой m подвешен на пружине.
В этом случае упругая сила F1 уравновешивает силу тяжести mg. Если сместить шарик на расстояние х , то на него будет действовать большая упругая сила (F1 + F). Изменение упругой силы по закону Гука пропорционально изменению длины пружины или смещению шарика х:
где k - жесткость пружины. Знак "-" отражает то обстоятельство, что смещение и сила имеют противоположные направления.
где (w 0 t + a 0) = a - фаза колебаний; a 0 - начальная фаза при t = 0; w 0 - круговая частота колебаний; A - их амплитуда.
Итак, смещение x изменяется со временем по закону косинуса.
Следовательно, движение системы, находящейся под действием силы вида f = - kx, представляет собой гармоническое колебание.
Для пружинного маятника получаем:
Круговая частота связана с обычной n соотношением: .
Энергия при гармоническом колебании
Выясним, как изменяется со временем кинетическая Еk и потенциальная Еп энергия гармонического колебания. Кинетическая энергия равна:
, (4)где k = m w 0 2 .
Потенциальную энергию находим из формулы потенциальной энергии для упругой деформации и используя (3):
(5)Складывая (4) и (5), с учетом соотношения
, получим:E = E K + E П =
. (6)Таким образом, полная энергия гармонического колебания остается постоянной в отсутствие сил трения, во время колебательного процесса кинетическая энергия переходит в потенциальную и наоборот.
Затухающие колебания
Колебания, происходящие в системе при отсутствии внешних сил (но при наличии потерь на трение или излучение), называются свободными. Частота свободных колебаний зависит от свойств системы и интенсивности потерь.
Наличие трения приводит к затухающим колебаниям. Колебания с убывающей амплитудой называются затухающими.
Допустим, что на систему, кроме квазиупругой силы, действуют силы сопротивления среды (трения), тогда второй закон Ньютона имеет вид:
. (7)Ограничимся рассмотрением малых колебаний, тогда и скорость системы будет малой, а при небольших скоростях сила сопротивления пропорциональна величине скорости:
, (8)где r - коэффициент сопротивления среды. Знак " - " обусловлен тем, что F тр и V имеют противоположные направления.
Подставим (8) в (7). Тогда
илиОбозначим
,
где b - коэффициент затухания, w 0 - круговая частота собственных колебаний. Тогда
Решение этого уравнения существенно зависит от знака разности: w 2 = w 0 2 -b 2 , где w - круговая частота затухающих колебаний. При условии w 0 2 -b 2 > 0, w является действительной величиной и решение (3) будет следующим:
График этой функции дан на рисунке.
Рис. 2. Затухающие колебания.
Пунктиром изображено изменение амплитуды: A = ±A 0 e - b t .
Период затухающих колебаний зависит от коэффициента трения и равен:
(11)При незначительном сопротивлении среды (b2 < Из формулы, выражающей закон убывания амплитуды колебаний, можно убедиться, что отношение амплитуд, отделенных друг от друга интервалом в один период (Т), остается постоянным в течение всего процесса затухания. Действительно, амплитуды колебаний, отделенные интервалом в один период, выражаются так: Это отношение называют
этого отношения:
Эта величина носит название логарифмического декремента затухания за период.
При сильном затухании b 2 > w02 из формулы (11) следует, что период колебания является мнимой величиной. Движение при этом носит апериодический (непериодический) характер - выведенная из положения равновесия система возвращается в положение равновесия, не совершая колебаний. Каким из этих способов приходит система в положение равновесия, зависит от начальных условий.
Вынужденные колебания. Резонанс
Вынужденными называются такие колебания, которые возникают в колебательной системе под действием внешней периодически изменяющейся силы (вынуждающей силы). Пусть вынуждающая сила изменяется со временем по гармоническому закону: f = F0 cosW t , где F0 - амплитуда, W - круговая частота вынуждающей силы.
При составлении уравнения движения нужно учесть, кроме вынуждающей силы, также те силы, которые действуют в системе при свободных колебаниях, то есть квазиупругую силу и силу сопротивления среды. Тогда уравнение движения (второй закон Ньютона) запишется следующим образом:
Разделив это уравнение на m и перенеся члены с dx и d 2 x в левую часть получим неоднородное линейное дифференциальное уравнение второго порядка.
Темы кодификатора ЕГЭ: гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания - это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания - это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия - это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание . Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела - это величина его наибольшего отклонения от положения равновесия.
Период колебаний - это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний - это величина, обратная периоду: . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них - синус и косинус - являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания - это колебания, при которых координата зависит от времени по гармоническому закону:
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому - амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой . Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
(2)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1) :
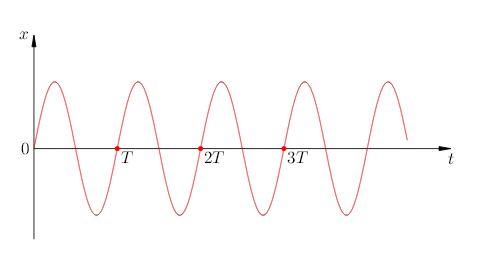
График функции (1) , выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1 .
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
График гармонических колебаний в этом случае представлен на рис. 2 .
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
График колебаний представлен на рис. 3 .
 |
| Рис. 3. Закон синуса |
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1) . Дифференцируем это равенство:
. (4)
Теперь дифференцируем полученное равенство (4) :
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
. (6)
Это соотношение называется уравнением гармонических колебаний . Его можно переписать и в таком виде:
. (7)
C математической точки зрения уравнение (7)
является дифференциальным уравнением
. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
Решением уравнения (7) является всякая функция вида (1) с произвольными ;
Никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6) , (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий - по начальным значениям координаты и скорости.
Пружинный маятник.
Пружинный маятник - это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4 ). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу , жёсткость пружины равна .
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона для груза в проекции на ось имеет вид:
. (8)
Если (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и . Наоборот, если , то . Знаки и всё время противоположны, поэтому закон Гука можно записать так:
Тогда соотношение (8) принимает вид:
Мы получили уравнение гармонических колебаний вида (6) , в котором
Циклическая частота колебаний пружинного маятника, таким образом, равна:
. (9)
Отсюда и из соотношения находим период горизонтальных колебаний пружинного маятника:
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10) .
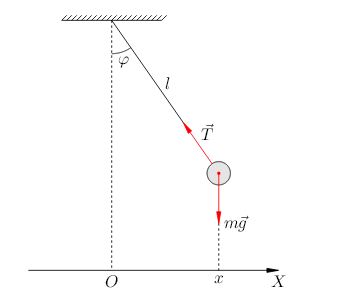
Математический маятник.
Математический маятник - это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5 ). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
и спроектируем его на ось :
Если маятник занимает положение как на рисунке (т. е. ), то:
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
Итак, при любом положении маятника имеем:
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11) :
Это - уравнение гармонических колебаний вида (6) , в котором
Следовательно, циклическая частота колебаний математического маятника равна:
. (12)
Отсюда период колебаний математического маятника:
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания
, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6 ).
Вынужденные колебания - это колебания, совершаемые системой под воздействием внешней силы , периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна , а вынуждающая сила зависит от времени по гармоническому закону:
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7 .
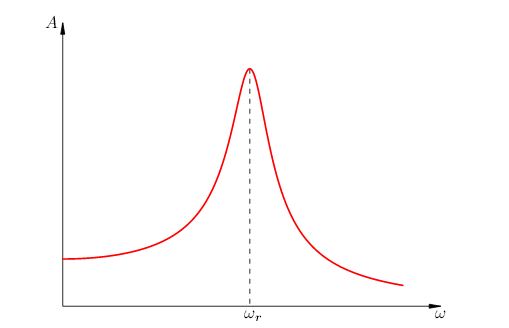 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты наступает резонанс - явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы: , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний, , а амплитуда колебаний возрастает до бесконечности при .
Следует уделить время небольшому очерку, посвященному колебательному движению. Но прежде необходимо ответить на один важный вопрос. Что понимают под механическими колебаниями? Под ними подразумевают движение, во время которого наблюдаемое тело неоднократно занимает одни и те же положения в пространстве.
Физики различают непериодические и периодические колебания. К первым относят те из них, при которых координаты и другие характеристики тела не поддаются описанию с помощью периодических функций времени. Со вторым видом проще. Периодические колебания - это те, которые можно описать с помощью периодических функций времени. Но что под ними подразумевают? В физике также под колебаниями часто понимают процессы, в определённой степени повторяемые во времени. И отдельно относительно рассматриваемой темы следует сказать следующее. Механические колебания условно можно классифицировать таким образом:
- В зависимости от условий возникновения:
- Вынужденные;
- Автоколебания;
- Свободные.
- В зависимости от изменения кинетической энергии во времени:
- Гармонические;
- Пилообразные;
- Затухающие.
В статье будут рассмотрены не все, а только некоторые типы колебаний. Отдельно стоит сказать о формулах, их использовании и разнообразии. Если кратко, то их много. Разнообразие, в котором представлены механические колебания, формулы определения их параметров подтолкнули ученых к созданию отдельных справочников, рассчитанных на определённые ситуации. Придумывать самостоятельно, таким образом, ничего не надо. При создании колебательной системы необходимо будет всего потратить полчаса или час на то, чтобы найти формулу под конкретную ситуацию.
Характеристика механических колебаний

Для характеристики механических колебаний используются физические величины, которые позволяют получить необходимые данные. Амплитуда колебания - наибольшее отклонение тела, которое качается от начального значения положения. А что такое период? В нем колебания - это время, которое необходимо телу, чтобы повторить все свои движения, или другими словами, необходимое для совершения одного повторения движения. Что подразумевают под частотой? Под ней понимают число, равное количеству колебаний, совершенных за одну единицу времени. Зачастую в домашних, школьных и университетских опытах за частоту принимают одну секунду. Циклическая частота часто используется вместо понятия количества колебаний, произошедших за единицу времени, и подразумевает его подсчёт, необходимый на совершение одного такого цикла.
Гармонические механические колебания
Под гармоническими колебаниями подразумеваются те из них, физическая величина которых, выбранная для характеристики, изменяется на временном интервале в виде синусоидальной кривой, которую легко отобразить в графическом режиме. При изменении координаты материальной точки, согласно гармоническому закону, импульс, скорость и ускорение изменяются тоже по нему.
Свободные колебания

Когда колебание совершается в системе благодаря первоначальной энергии, то его называют свободным. В качестве практического отображения такого типа физического процесса используют специальные модели: пружинный и математический маятники. Они позволяют работать с самыми распространёнными ситуациями. В качестве математического маятника принимают точку, что колеблется и висит на нерастяжимой и невесомой нити. Такого устройства на земле нет. Поэтому ближе всего к теоретической модели находится конструкция, составленная из шара, диаметр (размер) которого значительно меньше, чем длина нити. Необходимо провести действия физического характера. Отклоните такой шар от своего начального положения и отпустите. И так любой экспериментатор сможет увидеть механические колебания. Период, а также их частота зависят исключительно от параметров системы: длины нити математического маятника, жесткости пружины, массы груза (важно для пружинного маятника). Именно из-за этого свободные колебания ещё называют собственными колебаниями системы. Вполне логично. А частоту, с которой всё происходит, называют системной.

Превращение энергии при механических колебаниях
Потенциальная и кинетическая энергии при движениях тела переходят одна в другую. И то же самое - наоборот. Когда система отклоняется от начального положения равновесия на наибольшее возможное значение, то потенциальная энергия тоже достигает своего максимального значения, тогда как кинетика тела - минимального. Отдельно следует сказать об одном заблуждении, популярном среди людей. Когда достигается положение равновесия, то потенциальная энергия находится в точке своего минимума (обычно считают, что здесь она равняется нулю), тогда как кинетика (а это и импульс тела, и скорость его движения) достигает максимума. На практике учитывается ещё кое-что. В реальных системах присутствуют не потенциальные силы, значение которых не равняется нулю. Энергия системы растрачивается за счёт работы сил опоры, трения воздуха, внутренних сил пружины или подвеса. Постепенно уменьшается амплитуда колебания тела. Такие колебания и называются затухающими. Если сила трения слишком велика, то весь запас энергии может быть израсходован уже за период одного колебания, и движение тела не будет периодическим.
Вынужденные колебания
Под вынужденными колебаниями понимают те из них, которые происходят под влиянием внешней силы, совершающей работу, что меняется во времени. Есть и другая формулировка. Благодаря внешнему притоку энергии, она в самой системе поддерживается на достаточном уровне, чтобы происходили собственно колебания. Чтобы понять это, необходимо провести параллели с реальностью. Примером предмета, совершающего такого вида колебания, являются качели, на которых сидит один человек, а второй его раскачивает. Есть один нюанс. Если внешняя сила компенсирует потерю энергии в системе непрерывно или периодически, без прекращения самого процесса колебаний, то их называют незатухающими вынужденными.
О диапазоне можно отметить следующее. Амплитуда вынужденных колебаний полностью определена силой, которая действует извне, а также соотношением между собственными частотами принимающих участие в процессе сторон. И тут имеет место одно интересное явление. При вынужденных колебаниях периодически можно наблюдать резкое возрастание амплитуды, которое называется резонансом.
Резонанс

Он возникает в тех случаях, когда сила, что влияет на систему, становится очень близкой к её частоте колебаний. Возможен и другой вариант. В том случае, если частота влияющей силы кратна колебаниям самой системы, на которую она воздействует, тоже возникает резонанс. Как он графически изображается? Зависимость амплитуд колебания системы от частоты влияющей силы выражают с помощью резонансной кривой.

Автоколебания
Свое применение автоколебания нашли в технике. Они существуют там, где незатухающие колебания поддерживаются благодаря энергии источника, который может автоматически включать и выключать сама система. В таких случаях можно всерьез рассматривать вопрос присвоения системе статуса автоколебательной. Почему? Тот момент, когда нужно подавать энергию для колебания, отслеживает подсистема, отвечающая за обратную связь. В зависимости от параметров тела, она может оказывать влияние сильно и сразу, или понемногу и постепенно. Она может открывать или закрывать возможность для поступления энергии в общую систему. Это её главное задание. В качестве примера автоколебательной системы можно вспомнить маятниковые часы, где источник энергии - это гиря, а анкерный механизм успешно справляется с ролью подсистемы обратной связи, регулирующей подачу кинетики, от которой зависят механические колебания.
Параметрические колебания
Под этим видом колебаний определяются те из них, которые происходят в системах, что периодически изменяют свои параметры. Что можно о них сказать? Единственное, чем определяются амплитуда и сила колебательной системы, - это её параметры.








